
📝 Publications
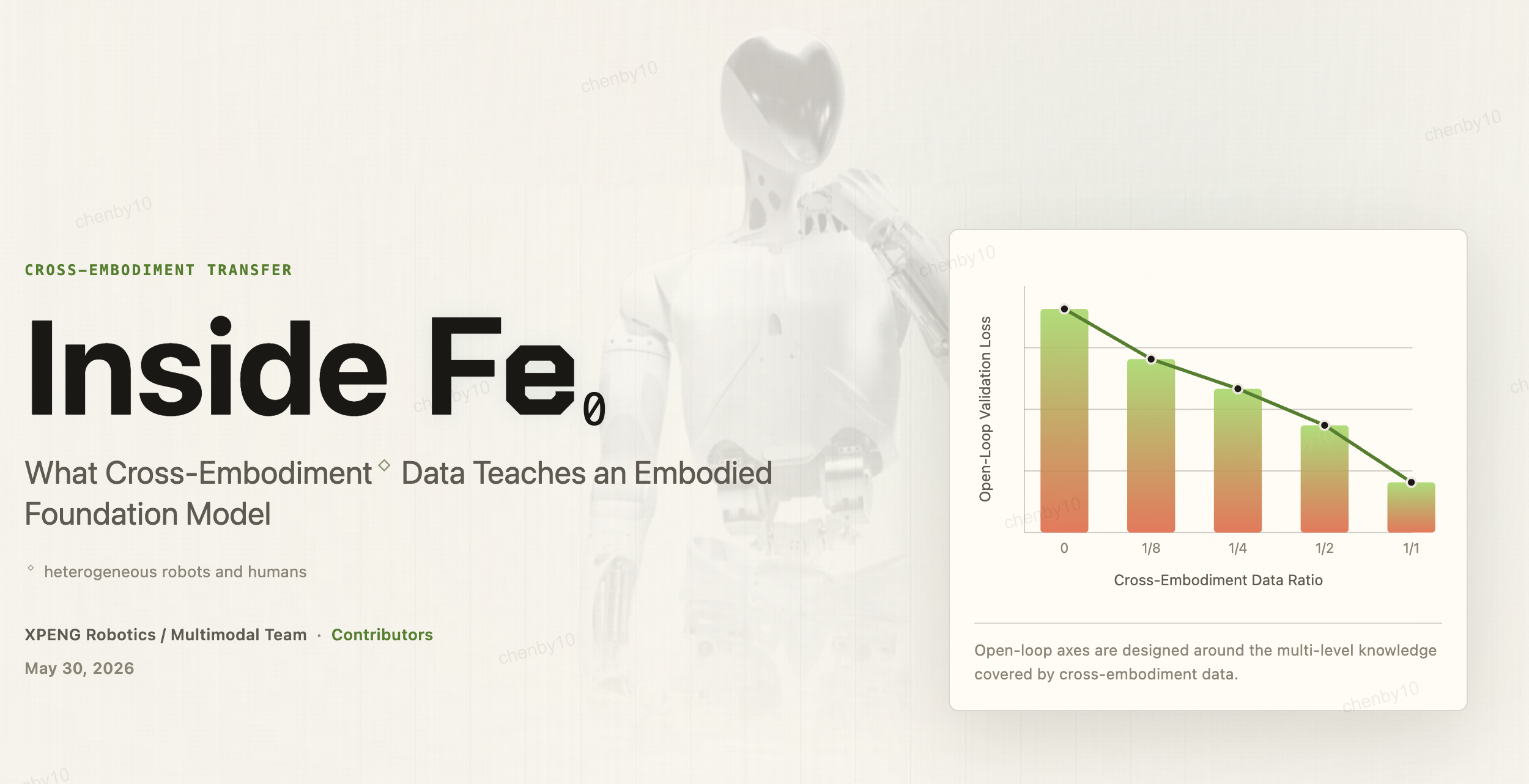
Inside Fe₀: What Cross-Embodiment Data Teaches an Embodied Foundation Model
*Co-first authors †Project lead
Technical Blog, 2026
Built on UniT and scaled to large-scale heterogeneous data, Fe0 combines minimal in-domain teleoperation with open-loop and on-robot evaluation across L1–L5, revealing what cross-embodiment data transfers—and where it fails.
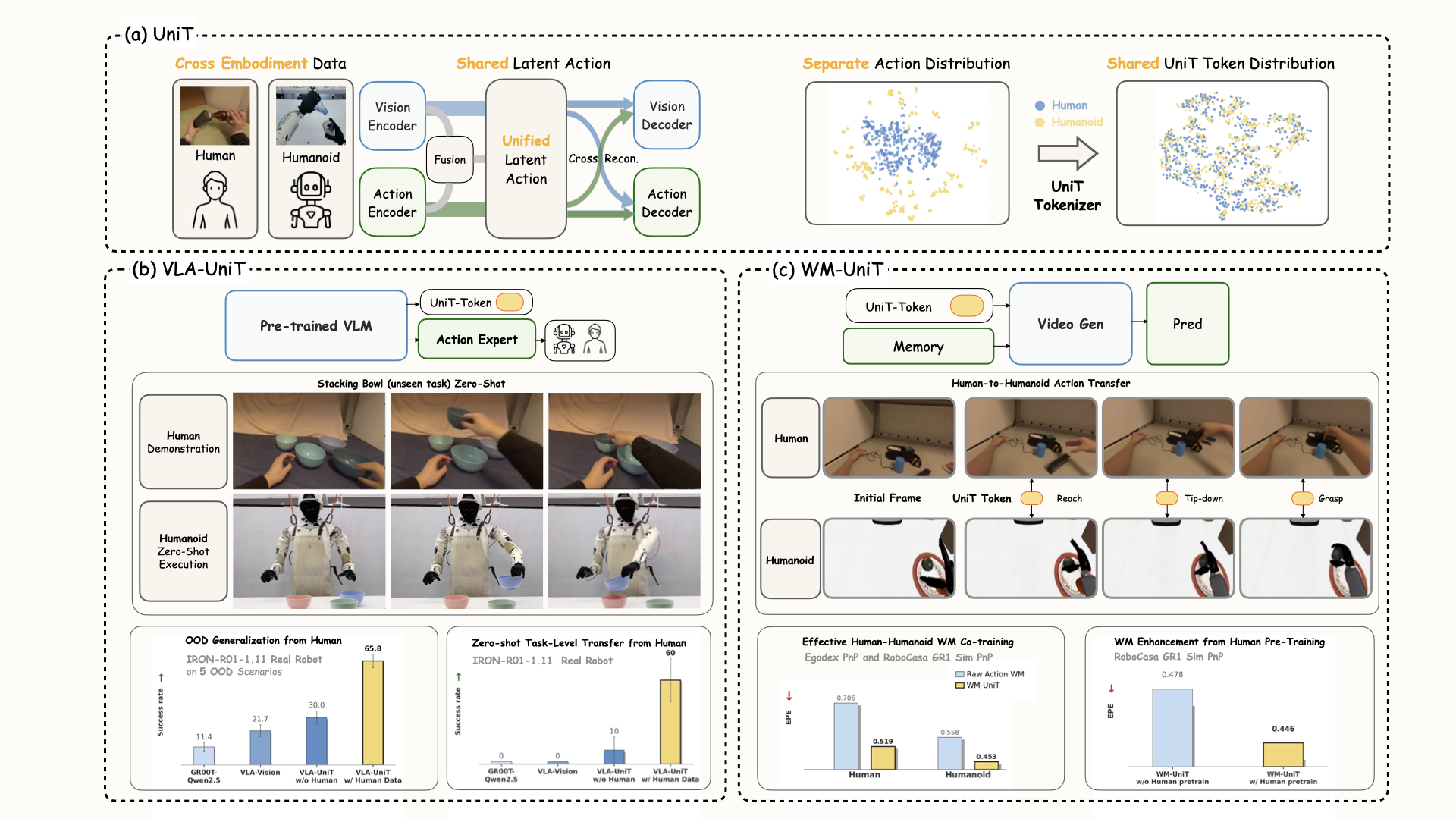
UniT: Toward a Unified Physical Language for Human-to-Humanoid Policy Learning and World Modeling
*Equal contribution †Corresponding author
Preprint, 2026
UniT establishes a unified physical language — a single tokenizer that enables zero-shot human-to-humanoid transfer for both policy learning and world modeling.
Project Page · Paper · Code